Лазерный гравер из старых DVD-Rom. Лазерный гравер своими руками – отличное решение для мастерской Делаем прибор для лазерной гравировки своими руками
Многие из тех домашних умельцев, которые в своей мастерской занимаются изготовлением и декоративным оформлением изделий из древесины и других материалов, наверняка задумывались над тем, как сделать лазерный гравер своими руками. Наличие такого оборудования, серийные модели которого стоят достаточно дорого, позволяет не только наносить на поверхность обрабатываемого изделия сложнейшие рисунки с высокой точностью и детализацией, но и осуществлять лазерную резку различных материалов.
Самодельный лазерный гравер, который обойдется значительно дешевле, чем серийная модель, можно изготовить даже в том случае, если вы не обладаете глубокими знаниями в электронике и механике. Лазерный гравер предлагаемой конструкции собирается на аппаратной платформе «Ардуино» (Arduino) и имеет мощность 3 Вт, тогда как у промышленных моделей этот параметр составляет не менее 400 Вт. Однако даже такая невысокая мощность позволяет использовать данный аппарат для резки изделий из пенополистирола, пробковых листов, пластика и картона, а также выполнять качественную лазерную гравировку.

Необходимые материалы
Для того чтобы самостоятельно изготовить лазерный гравер на Arduino, потребуются следующие расходные материалы, механизмы и инструменты:
- аппаратная платформа Arduino R3;
- плата Proto Board, оснащенная дисплеем;
- шаговые двигатели, в качестве которых можно использовать электромоторы из принтера или из DVD-плеера;
- лазер, мощность которого составляет 3 Вт;
- устройство для охлаждения лазера;
- регулятор напряжения постоянного тока DC-DC;
- транзистор MOSFET;
- электронные платы, при помощи которых осуществляется управление двигателями лазерного гравера;
- выключатели концевого типа;
- корпус, в котором можно разместить все элементы конструкции самодельного гравера;
- зубчатые ремни и шкивы для их установки;
- шарикоподшипники различных типоразмеров;
- четыре деревянных доски (две из них с размерами 135х10х2 см, а две другие – 125х10х2 см);
- четыре металлических стержня круглого сечения, диаметр которых составляет 10 мм;
- болты, гайки и винты;
- смазочный материал;
- стяжки-хомуты;
- компьютер;
- сверла различного диаметра;
- циркулярная пила;
- наждачная бумага;
- тиски;
- стандартный набор слесарных инструментов.

Электрическая часть самодельного лазерного гравера
Основным элементом электрической схемы представленного устройства является лазерный излучатель, на вход которого должно подаваться постоянное напряжение со значением, не превышающим допустимых параметров. Если не соблюсти данное требование, лазер может просто сгореть. Лазерный излучатель, используемый в гравировальной установке представленной конструкции, рассчитан на напряжение 5 В и силу тока, не превышающую 2,4 А, поэтому настройка регулятора DC-DC должна быть выполнена на силу тока 2 А и напряжение до 5 В.

Транзистор MOSFET, который является важнейшим элементом электрической части лазерного гравера, необходим для того, чтобы, получая сигнал от контроллера «Ардуино», включать и выключать лазерный излучатель. Электрический сигнал, вырабатываемый контроллером, является очень слабым, поэтому воспринимать его, а затем отпирать и запирать контур питания лазера может только транзистор MOSFET. В электрической схеме лазерного гравера такой транзистор устанавливается между плюсовым контактом лазера и минусовым регулятора постоянного тока.
Шаговые электродвигатели лазерного гравера подключаются через одну электронную плату управления, что обеспечивает синхронность их работы. Благодаря такому подключению зубчатые ремни, приводимые в движение несколькими двигателями, не провисают и сохраняют стабильное натяжение в процессе своей работы, что обеспечивает качество и точность выполняемой обработки.
Следует иметь в виду, что лазерный диод, используемый в самодельной гравировальной установке, не должен перегреваться.
Для этого необходимо обеспечить его эффективное охлаждение. Решается такая задача достаточно просто: рядом с диодом устанавливают обычный компьютерный вентилятор. Чтобы исключить перегрев плат управления работой шаговых электродвигателей, рядом с ними также размещают компьютерные кулеры, так как обычные радиаторы с такой задачей не справляются.
Фотографии процесса сборки электросхемыФото-1
Фото-2
Фото-3
Фото-4
Фото-5
Фото-6
Процесс сборки
Самодельный гравировальный станок предложенной конструкции – это устройство челночного типа, один из подвижных элементов которого отвечает за перемещение по оси Y, а два других, спаренных, – за перемещение по оси X. За ось Z, которая также оговаривается в параметрах такого 3D-принтера, принимается глубина, на которую осуществляется прожиг обрабатываемого материала. Глубина отверстий, в которые устанавливаются элементы челночного механизма лазерного гравера, должна составлять не менее 12 мм.
Рамка рабочего стола – размеры и допускиФото-1
Фото-2
Фото-3
Фото-4
Фото-5
Фото-6
В качестве направляющих элементов, по которым будет перемещаться рабочая головка лазерного гравировального устройства, могут выступать алюминиевые стержни диаметром не менее 10 мм. Если найти стержни из алюминия не представляется возможным, для этих целей можно использовать стальные направляющие такого же диаметра. Необходимость применения стержней именно такого диаметра объясняется тем, что в таком случае рабочая головка лазерного гравировального устройства не будет провисать.
Изготовление подвижной кареткиФото-1
Фото-2
Фото-3
Поверхность стержней, которые будут использоваться в качестве направляющих элементов для лазерного гравировального устройства, надо очистить от заводской смазки и тщательно отшлифовать до идеальной гладкости. Затем на них следует нанести смазывающий состав на основе белого лития, который улучшит процесс скольжения.

Установка шаговых двигателей на корпус самодельного гравировального устройства осуществляется при помощи кронштейнов, изготовленных из листового металла. Чтобы сделать такой кронштейн, лист металла, ширина которого приблизительно соответствует ширине самого двигателя, а длина в два раза превышает длину его основания, сгибают под прямым углом. На поверхности такого кронштейна, где будет располагаться основание электромотора, сверлят 6 отверстий, 4 из которых необходимы для фиксации самого двигателя, а два остальных – для крепления кронштейна к корпусу при помощи обычных саморезов.
Для установки на вал электромотора приводного механизма, состоящего из двух шкивов, шайбы и болта, также используется кусок металлического листа соответствующего размера. Чтобы смонтировать такой узел, из металлического листа формируют П-образный профиль, в котором просверливаются отверстия для его крепления к корпусу гравера и для выхода вала электродвигателя. Шкивы, на которые будут надеваться зубчатые ремни, насаживаются на вал приводного электромотора и размещаются во внутренней части П-образного профиля. Надетые на шкивы зубчатые ремни, которые должны приводить в движение челноки гравировального устройства, соединяются с их деревянными основаниями при помощи саморезов.
Установка шаговых двигателейФото-1
Фото-2
Фото-3
Фото-4
Фото-5
Фото-6
Установка программного обеспечения
Вашему лазерному гроверу, который должен работать в автоматическом режиме, потребуется не только установка, но и настройка специального программного обеспечения. Важнейшим элементом такого обеспечения является программа, которая позволяет создавать контуры желаемого рисунка и преобразовывать их под расширение, понятное управляющим элементам лазерного гравера. Такая программа имеется в свободном доступе, и ее можно без особых проблем скачать на свой компьютер.
Программа, скачанная на управляющий гравировальным устройством компьютер, распаковывается из архива и устанавливается. Кроме того, вам потребуется библиотека контуров, а также программа, которая будет отправлять данные по создаваемому рисунку или надписи на контроллер «Ардуино». Такую библиотеку (как и программу для передачи данных на контроллер) также можно найти в свободном доступе. Для того чтобы ваша лазерная самоделка работала корректно, а гравировка, выполняемая с ее помощью, была качественной, вам потребуется настройка и самого контроллера под параметры гравировального устройства.
Особенности использования контуров
Если с вопросом о том, как сделать ручной лазерный гравер, вы уже разобрались, то необходимо прояснить и вопрос о параметрах контуров, которые могут наноситься при помощи такого устройства. Такие контуры, внутренняя часть которых не заполняется даже в том случае, если исходный рисунок закрашен, должны передаваться на контроллер гравера файлами не в пиксельном (jpeg), а векторном формате. Это значит, что изображение или надпись, наносимые на поверхность обрабатываемого изделия при помощи такого гравера, будут состоять не из пикселей, а из точек. Такие изображения и надписи можно как угодно масштабировать, ориентируясь на площадь поверхности, на которую они должны быть нанесены.
При помощи лазерного гравера на поверхность обрабатываемого изделия можно нанести практически любой рисунок и надпись, но для этого их компьютерные макеты необходимо перевести в векторный формат. Выполнить такую процедуру несложно: для этого используются специальные программы Inkscape или Adobe Illustrator. Файл, уже переведенный в векторный формат, необходимо преобразовать еще раз, чтобы его смог корректно воспринимать контроллер гравировальной установки. Для такого преобразования используется программа Inkscape Laserengraver.
Окончательная настройка и подготовка к работе
Изготовив лазерный гравировальный станок своими руками и закачав в его управляющий компьютер необходимое программное обеспечение, не приступайте к работе сразу: оборудование нуждается в окончательной настройке и регулировке. В чем заключается такая регулировка? Прежде всего необходимо убедиться, что максимальные перемещения лазерной головки станка по осям X и Y совпадают со значениями, полученными при преобразовании векторного файла. Кроме того, в зависимости от толщины материала, из которого изготовлено обрабатываемое изделие, надо отрегулировать параметры тока, подаваемого на лазерную головку. Делать это нужно для того, чтобы не прожечь изделие, на поверхности которого требуется выполнить гравировку.
В предыдущей статье я описал опыт сборки и наладки гравера из китайского набора. Поработав с аппаратом, понял, что в моей лаборатории он будет не лишним. Задача поставлена, буду решать.
На горизонте два варианта решения — заказ набора в Китае и разработка собственной конструкции.
НЕДОСТАТКИ КОНСТРУКЦИИ С ALIEXPRESS
Как и писал в предыдущей статье, набор оказался вполне работоспособным. Практика работы со станком выявила следующие недостатки конструкции:
- Плохо проработана конструкция каретки. На видео в предыдущей статье это хорошо заметно.
- Ролики подвижных узлов крепятся на панелях винтами М5 и связаны с панелью только с одной стороны. При этом, как ни затягивай винты, остается люфт.
ПЛАСТИКОВЫЕ ДЕТАЛИ
Поскольку каркас из станочного профиля вполне достойный, устранить выявленные недостатки получилось переработав пластиковые детали.
Держатель лазера я достаточно хорошо описал в . Также в конструкцию я добавил дополнительную деталь, связывающую все четыре ролика на правой и левой панелях. Деталь позволила исключить люфты при перемещении панелей.
Все детали имеют достаточно простые формы и не требуют поддержек и других сложностей при печати.
Для заказа набора пластиковых деталей необходимо перейти в интернет-магазин:
Модели пластиковых деталей для печати доступны:
ДЕМОНСТРАЦИЯ РАБОТЫ
Работу гравера и его внешний вид можно оценить в следующем видео.
КОНСТРУКЦИЯ ГРАВЕРА
Каркас гравера построен на станочном алюминиевом профиле 20х40. Детали, несущие подвижные части гравера выполнены на 3D принтере. Подвижные части перемещаются на стандартных роликах. Каретка, несущая лазерный модуль позволяет регулировать высоту лазера над рабочим столом, что позволяет фокусировать мощность лазерного луча в достаточно большом диапазоне.
Сборка конструкции показана в формате 3D PDF .
СБОРКА
Конструкция весьма простая. По этой причине много времени и мучений на сборку не уйдет, если соблюдать рекомендованную последовательность сборки.
ШАГ 1. КАРКАС
Как описано выше, каркас построен из конструкционного профиля 20х40. Для скручивания профиля между собой используются внутренние уголки.
На более длинных деталях в центральных отверстиях торцов нарезана резьба для монтажа ножек и боковых панелей (на средней по длине).

Каркас скручивается на уголках, короткими деталями внутрь. На данном этапе не стоит до конца затягивать винты — сделать это лучше после установки ножек.

Ножки крепятся на винтах в четырех точках. Это сделано для того, чтобы каркас собирался без возможных перекосов.

Для начала потребуется закрепить все четыре ножки, снова не до конца затягивая крепеж.

Теперь необходимо найти максимально ровную поверхность! Выставить все детали таким образом, чтобы каркас «стоял» плотно, не играя на поверхности.

Протягиваем все крепежи, начиная с внутренних уголков и контролируя возможные перекосы угольником.

ШАГ 2. ПРАВАЯ ПАНЕЛЬ
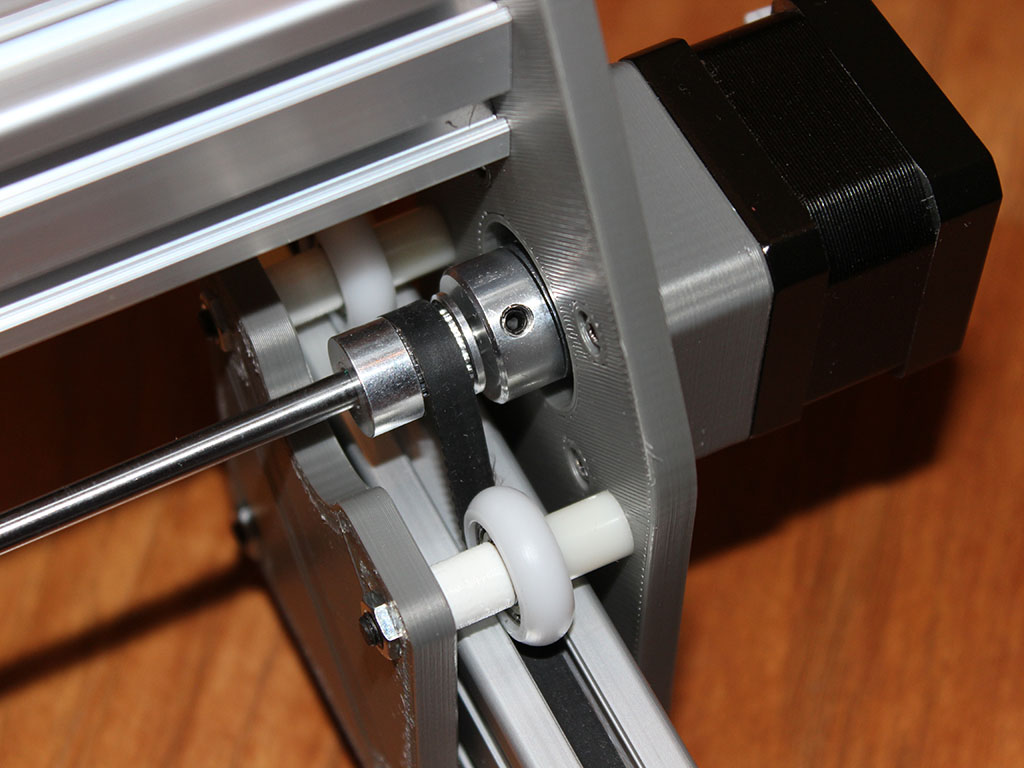
Перед сборкой правой панели на вал двигателя необходимо установить гибкую муфту.

Затем необходимо прикрутить шаговый двигатель через проставку из пластика.

Положение кабельного вывода и проставка хорошо видны на рисунке ниже.

ШАГ 3. ЛЕВАЯ ПАНЕЛЬ
Для сборки левой панели потребуется только запрессовать подшипник в отверстие.

Я постарался исключить операцию склеивания. Для этого «пустил волну» по поверхности отверстия для установки подшипника. По этой причине необходимо с усилием вдавить подшипник.

ШАГ 4. МОНТАЖ ЛЕВОЙ ПАНЕЛИ


Затем установить сборку на профиль.

И закрепить нижние ролики. На рисунке хорошо видно, что крепежные отверстия винтов для крепления роликов имеют ход в несколько миллиметров. Это сделано для того, чтобы верхние и нижние ролики можно было хорошо стянуть на профиле, исключив люфт. Единственное, действовать потребуется аккуратно и не перетянуть. В этом случае шаговому двигателю потребуется излишнее усилие для перемещения панелей.

ШАГ 5. МОНТАЖ ПРАВОЙ ПАНЕЛИ
Для монтажа потребуются следующие детали.

Сначала потребуется установить верхние ролики.

Затем установить сборку на профиль и установить нижние ролики. Дальнейший монтаж идентичен монтажу левой панели.

После протягивания винтов потребуется проконтролировать ход панели. Она должна перемещаться достаточно легко и при этом отсутствовать люфт.

ШАГ 6. МОНТАЖ НАПРАВЛЯЮЩЕЙ КАРЕТКИ
Для передачи движения по оси Y в данной конструкции используются обе панели. Для того, чтобы не задействовать 2 шаговых двигателя, крутящий момент на левую панель передается через вал, диаметром 5мм. После подготовки деталей приступаем.

Сначала устанавливается связующий вал и зажимается стопорными винтами гибкой муфты.

При установке необходимо проконтролировать, чтобы не были забыты шкивы. Жестко крепить их в данный момент нет необходимости. При натягивании ремней потребуется регулировка.

ШАГ 7. КАРЕТКА
Сборка каретки детально рассмотрена в предыдущей статье…

Сборка не представляет особого труда.

ШАГ 8. МОНТАЖ КАРЕТКИ НА НАПРАВЛЯЮЩУЮ
Для начала потребуется собрать все необходимые детали.

Все операции монтажа идентичны операциям монтажа панелей.

ШАГ 9. МОНТАЖ РЕМНЕЙ
Ремни притягиваются винтами под гайки профиля. Потребуется по-месту отрезать 3 ремня и подготовить крепеж.

Для начала край ремень располагается в нише профиля зубом вниз. После этого устанавливается гайка. Для установки гайки потребуется усилие.

Во время натягивания ремня потребуется выставить положение шкива. Шкив выставляется так, чтобы на всем ходу ремень как можно меньше притирался к боковым граням шкива.
Для установки ремня направляющей каретки лучше приподнять ее как показано на рисунке ниже, поскольку гайки все же лучше установить в нишу с торца.

После направляющая опускается на штатное место.

Перед затягиванием второго «хвоста» ремня необходимо убедиться, что ремень натянут достаточно сильно.

На этом сборка механики завершается.

КОНТРОЛЛЕР
Описание контроллеров для управления гравером я планирую подготовить в отдельной статье. Следите за публикациями!
НАБОР ДЛЯ СБОРКИ И ЛАЗЕРНЫЙ ГРАВЕР ПОД КЛЮЧ
С декабря 2017 принимаю заказы на полный набор для сборки и собранного, настроенного и полностью готового к использованию лазерного гравера, описанного в статье. Информация доступна в интернет-магазине .
Если Вам помогла статья и есть желание поддержать новые проекты, ссылка для поддержки:

Все уже наверное слышали, что из пишущего DVD привода можно добыть полупроводниковый лазер и зажигать им спички и прожигать тонкую бумагу.
Но автор этого видео пошел дальше и сделал вполне себе такой удобный инструмент для гравировки по органическим поверхностям. И эта идея сразу как-то по другому заиграла. Надо отметить, что видеоинструкция изготовления лазерного гравера очень подробная. Автор подробно объясняет все шаги и зачем, что нужно. Единственно, о чем автор не сказал, что даже с таким маломощным лазером стоит обращаться очень аккуратно и избегать попадание в глаза даже отраженного от любой поверхности луча. Иначе можно серьезно повредить глаз. Есть способ поднять мощность лазера. Надо просто использовать несколько полупроводниковых лазеров и фокусировать их лучи в одну точку. Но это серьезно усложнит конструкцию и потребует более мощного источника питания.
- Что можно сделать из старых полотен циркулярных пил? Правильно — ножик. (0)
Очень полезный проект с подробным видео процесса изготовления ножа из полотна старых циркулярных дисков. Здесь присутствуют все этапы […] - Циркулярная пила своими руками. Распиловочный стол. (0)
Для начинающих. Такой станок может сделать своими руками каждый. Удивительно просто и доходчиво. И буквально нужен один старый советский […] - Что можно сделать из старого DVD плеера? Шикарную зарядку для смартфонов, например. (0)
Как летит время. Уже DVD видеоплееры устаревают и девать их некуда. Из очередной уходящей натуры можно еще много чего полезного […] - Где взять неодимовые магниты недорого, а бывает и совсем бесплатно. (0)
Возможно вам, также как и мне, понадобился неодимовый магнит. Не торопитесь его покупать. Есть несколько мест где можно взять их бесплатно. […]
Всем доброго времени!
В этом посте хочу поделится с Вами процессом создания лазерного гравера на основе диодного лазера из Китая.
Несколько лет назад появилось желание приобрести себе готовый вариант гравера с Aliexpress с бюджетом в 15 тыс, но после долгих поисков я пришел к выводу, что все представленные варианты слишком простые и по сути являются игрушками. А хотелось что-то настольное и при этом достаточно серьезное. Спустя месяц исследований было принято решение сделать сей аппарат своими руками, и понеслась...
В тот момент у меня еще не было 3D принтера и опыта 3D моделирования, но зато с черчением все было в порядке)
Вот собственно один из тех готовых граверов из Китая.
Насмотревшись на варианты возможных конструкций механики, на листочке были сделаны первые эскизы будущего станка..))

Было принято решение, что область гравировки должна быть не меньше листа А3.
Сам лазерный модуль был куплен одним из первых. Мощностью 2W, так как это было самым оптимальным вариантом за разумные деньги.
Вот собственно сам лазерный модуль.

И так, было решено, что ось X будет ездить по оси Y и началось ее проектирование. А началось все с каретки...
Вся рама станка была сделана из алюминиевых профилей разной формы, купленных в Леруа.

На этом этапе эскизы на тетрадных листочках больше не появлялись, все чертилось и придумывалось в Компасе.

Купив 2 метра квадратного профиля 40х40 мм для построения рамы станка в конечном итоге из него была сделана только сама каретка..))

Двигатели, линейные подшипники, ремни, валы и вся электроника заказывались с Aliexpress в процессе разработки и планы о том, как будут крепиться двигатели и какая будет плата управление менялись на ходу.
Спустя несколько дней черчения в Компасе был определен более менее четкий вариант конструкции станка.

И вот ось X появилась на свет..))

Боковины оси Y (извиняюсь за качество фото).

Примерка.

И наконец первый запуск!


Была построена простенькая 3D модель общего вида станка, дабы уже точно определиться с его внешним видом и размерами.

И понеслась... Оргстекло... Покраска, проводка и прочие мелочи.



И наконец, когда все было подогнано и последняя деталь была выкрашена в черный цвет , наступила финишная прямая!
Теперь немного красивых фото))


Внимание! Будьте осторожны при использовании лазеров. Лазер, применяемый в этой машине, может вызвать повреждение зрения и, возможно, слепоту. При работе с мощными лазерами, более 5 мВт, всегда надевайте пару защитных очков, предназначенных для блокировки длины волны лазера.
Лазерный гравер на Arduino – приспособление, роль которого – гравировка древесины и других материалов. За последние 5 лет лазерные диоды продвинулись вперед, что позволило сделать достаточно мощные граверы без особой сложности управления лазерными трубами.
Стоит осторожно гравировать другие материалы. Так, например, при использовании в работе с лазерным прибором пластмассы появится дым, который содержит опасные газы при сжигании.
В этом уроке я постараюсь дать направление мысли, а со временем мы создадим более подробный урок по реализации этого непростого устройства.
Для начала предлагаю посмотреть того как выглядел весь процесс создания гравера у одного радиолюбителя:
Сильные шаговые двигатели также требуют драйверов, чтобы максимально использовать их. В данном проекте взят специальный шаговый драйвер для каждого мотора.
Ниже приведены некоторые сведения о выбранных компонентах:
- Шаговый двигатель – 2 штуки.
- Размер кадра – NEMA 23.
- Крутящий момент 1.8 Нм на 255 унций.
- 200 шагов/оборотов – за 1 шаг 1,8 градусов.
- Ток – до 3,0 А.
- Вес – 1,05 кг.
- Биполярное 4-проводное соединение.
- Шаговый драйвер – 2 штуки.
- Цифровой степпинг-драйв.
- Микросхема.
- Выходной ток – от 0,5 А до 5,6 А.
- Ограничитель выходного тока – снижает риск перегрева двигателей.
- Сигналы управления: входы Step и Direction.
- Частота импульсного входа – до 200 кГц.
- Напряжение питания – 20 В – 50 В постоянного тока.
Для каждой оси двигатель непосредственно управляет шариковым винтом через соединитель мотора. Двигатели монтируются на раме с использованием двух алюминиевых углов и алюминиевой пластины. Алюминиевые углы и плита имеют толщину 3 мм и достаточно прочны, чтобы поддерживать двигатель (1 кг) без изгибов.
Важно! Нужно правильно выровнять вал двигателя и шариковый винт. Соединители, которые используются, имеют некоторую гибкость, чтобы компенсировать незначительные ошибки, но если ошибка выравнивания слишком велика, они не сработают!
Еще один процесс создания данного устройства можно посмотреть на видео:
2. Материалы и инструменты
Ниже представлена таблица с материалами и инструментами, необходимыми для проекта «лазерный гравер на Aрдуино».
| Пункт | Поставщик | Количество |
| Шаговый двигатель NEMA 23 + драйвер | eBay (продавец: primopal_motor) | 2 |
| Диаметр 16 мм, шаг 5 мм, шариковый винт длиной 400 мм (тайваньский) | eBay (продавец: silvers-123) | 2 |
| 16-мм ая поддержка BK12 с шариковым винтом (приводной конец) | eBay (продавец: silvers-123) | 2 |
| 16 мм BF12 Поддержка шарикового винта (без ведомого конца) | eBay (продавец: silvers-123) | 2 |
| 16 вал длиной 500 мм | (продавец: silvers-123) | 4 |
| (SK16) 16 опоры вала (SK16) | (продавец: silvers-123) | 8 |
| 16 линейный подшипник (SC16LUU) | eBay (продавец: silvers-123) | 4 |
| eBay (продавец: silvers-123) | 2 | |
| Держатель вала 12 мм (SK12) | (продавец: silvers-123) | 2 |
| A4-размер 4,5 мм прозрачный акриловый лист | eBay (продавец: acrylicsonline) | 4 |
| Алюминиевая Плоская штанга 100 мм x 300 мм x 3 мм | eBay (продавец: willymetals) | 3 |
| 50 мм x 50 мм 2.1 м Алюминиевый забор | Любой тематический магазин | 3 |
| Алюминиевая Плоская штанга | Любой тематический магазин | 1 |
| Алюминиевый угол | Любой тематический магазин | 1 |
| Алюминиевый угол 25 мм x 25 мм x 1 м x 1,4 мм | Любой тематический магазин | 1 |
| Винты с головной головкой M5 (различные длины) | boltsnutsscrewsonline.com | |
| M5 гайки | boltsnutsscrewsonline.com | |
| M5 шайбы | boltsnutsscrewsonline.com |
3. Разработка основания и осей

Машина использует шариковые винты и линейные подшипники для управления положением и движением осей X и Y.
Характеристики шариковых винтов и аксессуаров машины:
- 16 мм шариковый винт, длина – 400 мм-462 мм, включая обработанные концы;
- шаг – 5 мм;
- C7 рейтинг точности;
- BK12/BF12 шариковые опоры.
Так как шариковая гайка состоит из шариковых подшипников, катящихся в гусеничном ходу против шарикового винта очень малого трения, это означает, что двигатели могут работать на более высоких скоростях без остановки.
Вращательная ориентация шариковой гайки блокируется с помощью алюминиевого элемента. Базовая плита крепится к двум линейным подшипникам и к шариковой гайке через алюминиевый угол. Вращение вала Ballscrew приводит в линейное движение опорную плиту.
4. Электронная составляющая

Выбранный лазерный диод – это диод мощностью 1,5 Вт, 445 нм, установленный в корпусе размером 12 мм, с фокусируемым стеклянным объективом. Такие могут быть найдены, предварительно собраны, на eBay. Так как это лазер 445 нм, свет, который он производит, является видимым синим светом.
Лазерный диод требует радиатора при работе на высоких уровнях мощности. При конструировании гравера используются две алюминиевые опоры для SK12 12 мм, как для крепления, так и для охлаждения лазерного модуля.
Интенсивность выхода лазера зависит от тока, который проходит через него. Диод сам по себе не может регулировать ток, и, если он подключен непосредственно к источнику питания, он будет увеличивать ток до тех пор, пока он не разрушится. Таким образом, для защиты лазерного диода и управления его яркостью требуется регулируемая схема тока.
Еще один вариант схемы соединения микроконтроллера и электронных деталей:

5. Программное обеспечение
Эскиз Arduino интерпретирует каждый блок команд. Существует несколько команд:
1 – переместите ПРАВО на один пиксель FAST (пустой пиксель).
2 – переместите ПРАВО на один пиксель SLOW (сгоревший пиксель).
3 – переместите ЛЕВЫЙ на один пиксель FAST (пустой пиксель).
4 – переместите LEFT на один пиксель SLOW (сгоревший пиксель).
5 – перемещение вверх на один пиксель FAST (пустой пиксель).
6 – переместите UP на один пиксель SLOW (сгоревший пиксель).
7 – переместите ВНИЗ одним пикселем FAST (пустой пиксель).
8 – переместите ВНИЗ одним пикселем SLOW (сгоревший пиксель).
9 – включить лазер.
0 – выключить лазер.
r – вернуть оси в исходное положение.
С каждым символом Arduino запускает соответствующую функцию для записи на выходные выводы.
Arduino контролирует скорость двигателя через задержки между ступенчатыми импульсами . В идеальном случае машина будет запускать двигатели с одинаковой скоростью, независимо от того, гравирует ли ее изображение или пропускает пустой пиксель. Однако из-за ограниченной мощности лазерного диода машина должна немного замедляться при записи пикселя . Вот почему есть две скорости для каждого направления в списке символов команд выше.
Скетч 3-х программ для лазерного Arduino-гравера ниже:
/* Stepper motor control program */
// constants won"t change. Used here to set pin numbers:
const int ledPin = 13; // the number of the LED pin
const int OFF = 0;
const int ON = 1;
const int XmotorDIR = 5;
const int XmotorPULSE = 2;
const int YmotorDIR = 6;
const int YmotorPULSE = 3;
//half step delay for blank pixels - multiply by 8 (<8ms)
const unsigned int shortdelay = 936;
//half step delay for burnt pixels - multiply by 8 (<18ms)
const unsigned int longdelay = 2125;
//Scale factor
//Motor driver uses 200 steps per revolution
//Ballscrew pitch is 5mm. 200 steps/5mm, 1 step = 0.025mm
//const int scalefactor = 4; //full step
const int scalefactor = 8; //half step
const int LASER = 51;
// Variables that will change:
int ledState = LOW; // ledState used to set the LED
int counter = 0;
int a = 0;
int initialmode = 0;
int lasermode = 0;
long xpositioncount = 0;
long ypositioncount = 0;
//***********************************************************************************************************
//Initialisation Function
//***********************************************************************************************************
void setup()
{
// set the digital pin as output:
pinMode(ledPin, OUTPUT);
pinMode(LASER, OUTPUT);
for (a = 2; a <8; a++){
pinMode(a, OUTPUT);
}
a = 0;
setinitialmode();
digitalWrite (ledPin, ON);
delay(2000);
digitalWrite (ledPin, OFF);
// Turn the Serial Protocol ON
Serial.begin(9600);
}
//************************************************************************************************************
//Main loop
//************************************************************************************************************
void loop()
{
byte byteRead;
if (Serial.available()) {
/* read the most recent byte */
byteRead = Serial.read();
//You have to subtract "0" from the read Byte to convert from text to a number.
if (byteRead!="r"){
byteRead=byteRead-"0";
}
//Move motors
if(byteRead==1){
//Move right FAST
fastright();
}
if(byteRead==2){
//Move right SLOW
slowright();
}
if(byteRead==3){
//Move left FAST
fastleft();
}
if(byteRead==4){
//Move left SLOW
slowleft();
}
if(byteRead==5){
//Move up FAST
fastup();
}
if(byteRead==6){
//Move up SLOW
slowup();
}
if(byteRead==7){
//Move down FAST
fastdown();
}
if(byteRead==8){
//Move down SLOW
slowdown();
}
if(byteRead==9){
digitalWrite (LASER, ON);
}
if(byteRead==0){
digitalWrite (LASER, OFF);
}
if (byteRead=="r"){
//reset position
xresetposition();
yresetposition();
delay(1000);
}
}
}
//************************************************************************************************************
//Set initial mode
//************************************************************************************************************
void setinitialmode()
{
if (initialmode == 0){
digitalWrite (XmotorDIR, OFF);
digitalWrite (XmotorPULSE, OFF);
digitalWrite (YmotorDIR, OFF);
digitalWrite (YmotorPULSE, OFF);
digitalWrite (ledPin, OFF);
initialmode = 1;
}
}
//************************************************************************************************************
// Main Motor functions
//************************************************************************************************************
void fastright()
{
for (a=0; a
6. Запуск и настройка
Arduino представляет мозг для машины. Он выводит сигналы шага и направления для шаговых драйверов и сигнала разрешения лазера для драйвера лазера. В текущем проекте для управления машиной требуется только 5 выходных контактов. Важно помнить, что основания для всех компонентов должны быть связаны друг с другом.
7. Проверка работоспособности
Эта схема требует, по меньшей мере, питания 10 В постоянного тока, и имеет простой входной сигнал включения/выключения, который предоставляется Arduino. Микросхема LM317T представляет собой линейный регулятор напряжения, который настроен, как регулятор тока. В схему включен потенциометр, позволяющий регулировать регулируемый ток.
Новые статьи
- Русско-португальский разговорник для туристов (путешественников) с произношением
- Португальский язык для туристов
- Какие основные различия испанского языка в Испании и Латинской Америке?
- Датско-русские онлайн-переводчики Датский язык переводчик
- Чем отличается португальский язык от испанского
- Транзитный сатурн в оппозиции к натальному сатурну Оппозиция Луна – Сатурн в радиксе мужчины
- Гороскоп работы и денег
- Защита от сглаза и зависти поможет сохранить то, что дорого Как ставить защиту от
- Что значит, если снится сон во сне?
- Китайский гороскоп БЫК (Вол)
Популярные статьи
- Травяные чаи при боли в горле
- Что делать при поносе и температуре у взрослого
- Гадание на воске: правильное толкование фигур Порядок проведения гадания
- Совместимость лунных рыб Кто подходит женщине с луной в рыбах
- Что любит Скорпион в сексе?
- Снилось сосед спускается со стремянки по ванге
- Краткий курс теоретической механики
- Подготовка к ЕГЭ по математике (профильный уровень): задания, решения и объяснения
- Софийско-успенский собор в тобольске
- Полтавская епархия подтвердила свою верность канонической упц